

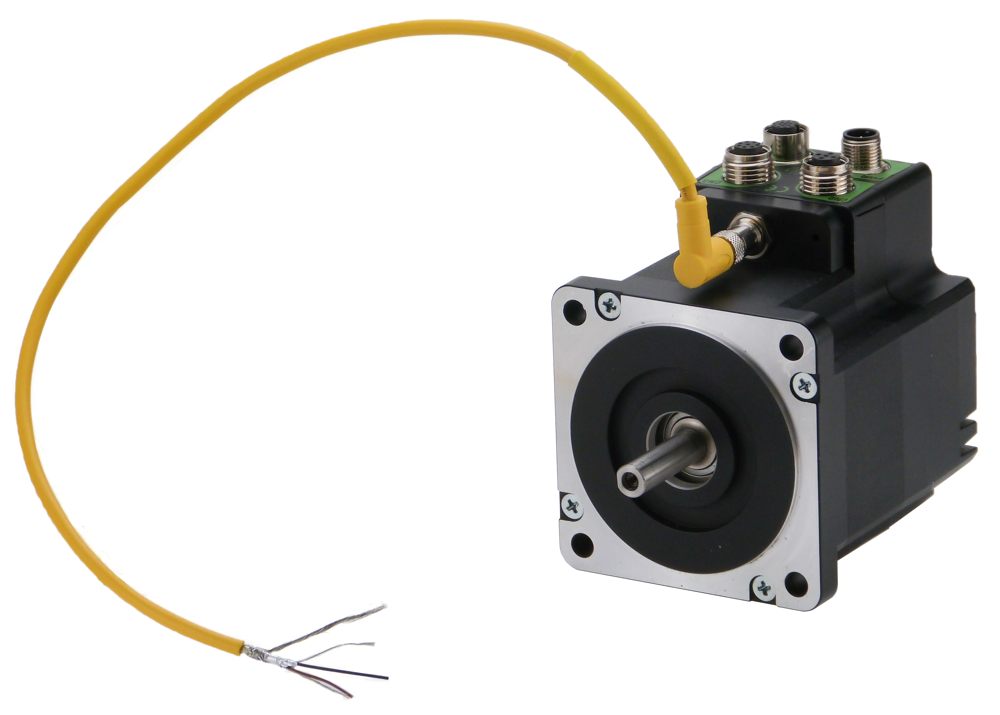
MIS340-MIS343 ServoStep - NEMA34 Programmable Integrated ServoStep Motors with Closed-Loop, Ethernet, multiturn encoder
|
The integrated ServoStep motors from JVL.
A wealth of possibilities in a series of of the world´s most compact stepper motors with the highest microstepping resolution. 4 sizes are available.
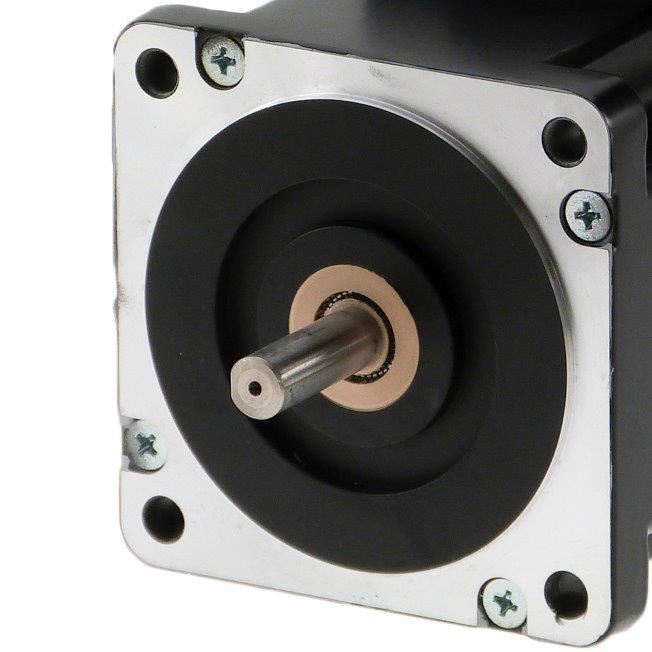
Stainless steel shaft AISI303 as standard on all models.
Optional:
 |
 |
 |
 |
 |
||
  |
||||||
|
||||||
|
|
||||||

- Specification
- Dimension
- Connectivity
- Operation modes
- Curves
- Youtube
| Running Torque [Nm]* |
Length [mm] |
Shaft [mm] |
Power Watt @72VDC* | Weight [kg] |
||
| Standard |
||||||
| MIS340C12 |
3.0 |
95.0 |
9.53 D-cut |
190.49 |
1.96 |
 |
| MIS340C49 |
3.0 |
95.0 |
14 keyway (5x5) |
190.49 |
1.96 |
 |
| MIS340C65 |
3.0 |
95.0 |
12.7 keyway (5x5) |
190.49 |
1.96 |
|
| MIS341C12 |
6.1 |
125.0 |
9.53 D-cut |
322.37 |
3.06 |
 |
| MIS341C14 |
6.1 |
125.0 |
14 keyway (5x5) |
322.37 |
3.06 |
 |
| MIS342C14 |
7.5 |
155.0 |
14 keyway (5x5) |
332.53 |
4.06 |
 |
| MIS343C14 |
10.0 |
185.0 |
14 keyway (5x5) |
296.21 |
5.16 |
 |
*: Tolerance for torque and power is ±10%
Industrial Ethernet and Closed-loop Absolute multiturn encoder magnetic feedback encoder (H4).

Choose between wireless Bluetooth, WLAN or Industrial Ethernet Profinet, Ethernet/IP, EtherCAT, Powerlink, MODBUS TCP/IP, SERCOS III, RS485 and PLC built-in are standard. 8IOA, SSI and pulse/direction
| Industrial Ethernet | Profinet, Ethernet/IP, EtherCAT, Powerlink, MODBUS TCP/IP, SERCOS III . Built in dual port Ethernet switch for simple wiring and cost reduction. | Read more |
| SSI (RS485) | Build in SSI interface for external incremental or absolute encoder. 5V balanced signals. | Read more |
| CANBUS | CANbus DS-301 with heartbeat/Node guarding/sync etc. | Read more |
| MODBUS (RS485) | RS485 interface for serial 2Mbit daisy chain communication for low cost solution. | Read more |
| MACTALK (RS485) | RS485 interface for live diagnostics, setup and user programming. | Read more |
| PLC | 8 input/output/analogue input allow highly advanced functions via the build in PLC. | Read more |
| Gear Mode (RS422) |
In this mode the ServoStep motor functions as in a step motor driver. The motor moves one step each time a voltage pulse is applied to the step-pulse input. Velocity, acceleration and deceleration are determined by the external frequency, but can be limited and controlled by the ServoStep motor. In addition, the ServoStep motor also provides a facility for electronic gearing at a keyed-in ratio. | |
| Serial Mode (RS485) |
In this mode the ServoStep motor’s registers contain the positions, velocities, accelerations, etc., required for the actual system. The registers can be selected and executed by a single byte sent via the serial interface. This mode provides maximum utilization of the ServoStep motor’s features since the ServoStep motor itself takes care of the entire positioning sequence. |
|
| Position and velocity Mode (RS485) |
With command sent over the serial interface can position and velocity be changed. Various operating parameters can be changed continuously while the motor is running. This mode of operation is used primarily in systems where the Controller is permanently connected to a PC/PLC via the interface. It is also well suited for setting up and testing. The mode is also used when programming is made. |
|
| Outputs | Up to 8 pcs high side for relay, PLC or brake control. 24VDC PNP high power 0,4A (peak 0,9A) each. Short circuit and reverse protected. | |
| Inputs | Up to 8 pcs 24VDC logic inputs that can we used for limit switch, homing, position capture, enable input, pulse/dir. | |
| Analogue input | Up to 8 pcs 0-5V 12bit that can we used in program for analogue to speed or position. Protected up to +-30VDC. | |
| RS422 | Input used for connection of external encoder, AB incremental signal or pulse and direction signal. 5VDC balanced signal A+.A-,B+.B- |
All measurements are taken while the motors are in open loop mode.
| MIS340 Power/Torque vs. Speed |
MIS341 Power/Torque vs. Speed |
|
 |
 |
|
| (download) |
(download) |
| MIS342 Power/Torque vs. Speed |
MIS343 Power/Torque vs. Speed |
|
 |
 |
|
| (download) |
(download) |
| Go to JVL Youtube Channel |
|
| JVL Presentation Video |
|
| JVL Academy |
|
|
|
|
|
|
|
|
|
|
|
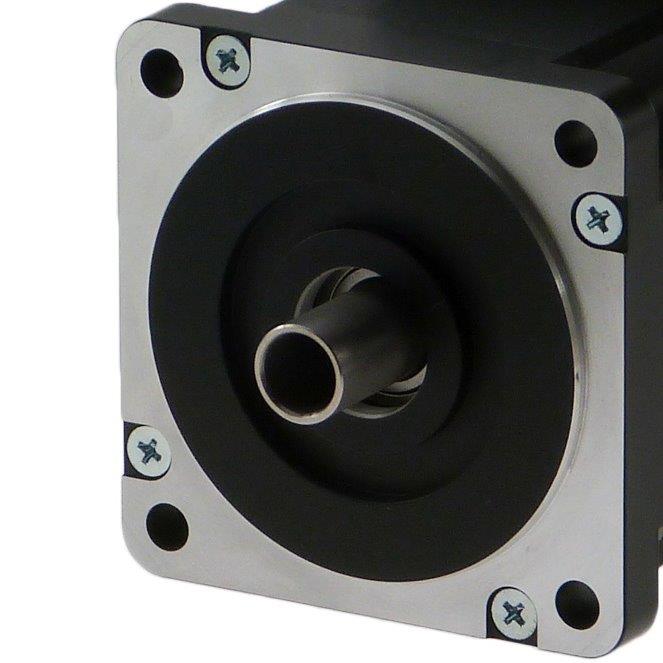
| Hollow |
Rear shaft |
IP65 |
Isolated from earth |
STO |
| Shaft option: 31/34 |
Shaft option: 13/15 |
Shaft option: 17/19 |
Motor option: 34xL |
Supply voltage option: S8 |
 |
 |
 |
|
 |
| Brake - Front |
Brake - Rear |
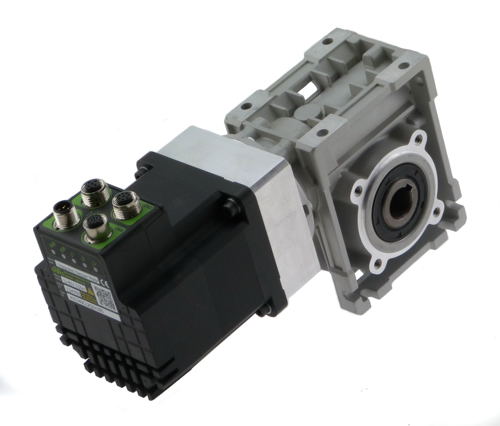
Gear |
||
| Bought seperately, see assembly order codes here |
Shaft option: 37/38/39 |
Bought seperately, see assembly order codes here |
||
 |
 |
 |
||
|
DETAILED
|
|
|
|
DOWNLOAD |











JVL A/S Bregnerødvej 127 DK-3460 Birkerød Denmark
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
