

Accessories - Rotary Table
|
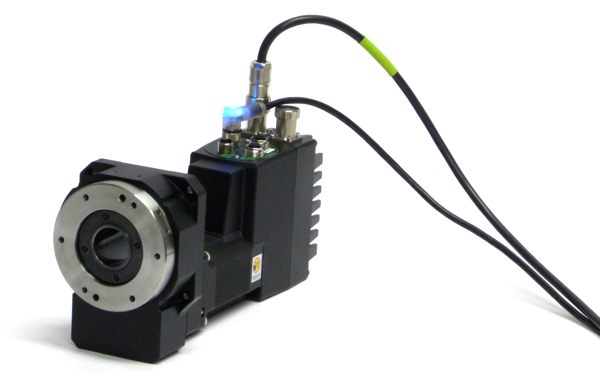
Hollow Rotary Actuator
Our new series of Hollow Rotary Actuators, HDCT, offer the easiest possible installation of rotary table applications. Depending on your application you can choose between servo and stepper motors – with or without built-in (absolute) encoders.
Mechanically they are ready to install – and mounting of rotating discs have never been easier. At the same time you gain the usual benefits of JVL’s integrated motors also making electrical installation child’s game.
No need for space in your electrical cabinet: drive and control electronics are built-in.
 |
|
 |
 |
 |
 |
 |
|||||
|
|
|||||
|
You can even choose to program the Actuators whereby they can run as stand-alone units. Should you prefer to run the actuator from a master PLC or controller choose between our large range of connectivity options, including all major Industrial Ethernet protocols.
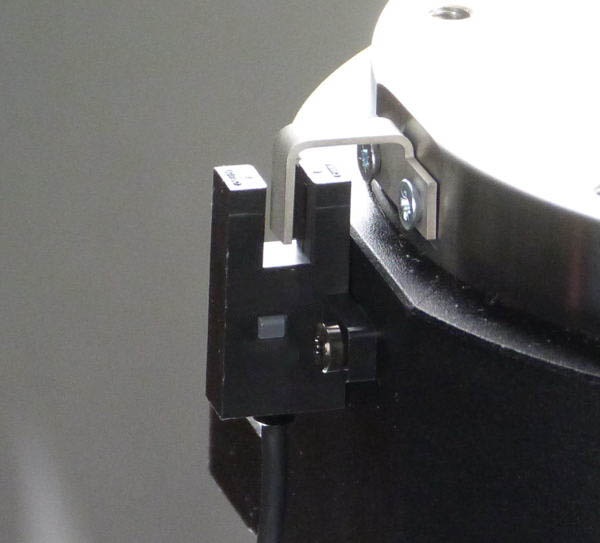
For even more comfort we can provide you with a sensor-kit with all the parts you need for Home sensor signaling, to be mounted directly onto the actuator.
A full Hollow Rotary Actuator package consist of:
|
|||||
|
Hollow Rotary Actuators, HDCT |
HDCT-100-N23 |
HDCT-100-M0400 |
HDCT-130-N23 |
HDCT-130-M0400 |
|
|
Recommended Motor |
|||||
|
Flange and Shaft Ø |
mm/mm |
57x57 / Ø6,35 |
60x60 / Ø14 |
57x57 / Ø6,35 |
60x60 / Ø14 |
|
Nominal Output Torque |
Nm |
6,8 |
6,8 |
12 |
12 |
|
Input Speed Max. |
RPM |
3.600 |
3.000 |
3.600 |
3.000 |
|
Output Speed Max. |
RPM |
200 |
167 |
200 |
167 |
|
Gear Ratio |
|
18:1 |
18:1 |
18:1 |
18:1 |
|
Gear Reducer Inertia |
kgcm² |
0,07 |
0,07 |
0,22 |
0,22 |
|
Output Table Inertia |
kgcm² |
|
|
|
|
|
Repetitive Positioning Accuracy |
arcsec |
±15 |
±15 |
±15 |
±15 |
|
Lost Motion |
arcmin |
3 |
3 |
3 |
3 |
| Axial Load |
N |
150 |
150 |
200 |
200 |
|
Permissible Thrust Load |
N |
1.200 |
1.200 |
2.000 |
2.000 |
|
Permissible Moment Load |
Nm |
36 |
36 |
50 |
50 |
|
Runout of Output Table Surface |
mm |
±0,015 |
±0,015 |
±0,015 |
±0,015 |
|
Parallelism of Platform |
mm |
±0,03 |
±0,03 |
±0,03 |
±0,03 |
|
Weight w/o Motor |
kg |
4,0 |
4,0 |
4,6 |
4,6 |
|
Industrial Ethernet |
MAC140: Yes.
MIS231: No, use instead SMC85 + MST23x |
Yes |
MAC140: Yes.
MIS231: No, use instead SMC85 + MST23x
|
Yes | |
|
Absolute Encoder option |
No. | Yes | No | Yes | |
|
Notes |
MAC400 is too strong: reduce Torque to 29% | Preferred Model. |
Preferred Model.
MAC400 is too strong: reduce Torque to 50% |
||
|
DETAILED |
|
DOWNLOAD |








JVL A/S Bregnerødvej 127 DK-3460 Birkerød Denmark
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
